Automotive Simulation Models (ASM)
Real-Time Models for Vehicle Development
ASM is a tool suite for simulating combustion engines, vehicle dynamics, electric components, and the traffic environment. The open Simulink models are used for model-based function development and in ECU tests on a hardware-in-the-loop (HIL) simulator.
-
ASM 22.2 - Battery systems/fuel cells
New features for battery systems/fuel cells, and improved RoadRunner support
Read more -
Video: Scenario Preview
-
Videos: First Steps with ASM
-
More Reality in Virtual Traffic
Detailed driving simulation coupled with detailed traffic simulation realized by co-simulations with dSPACE ASM for detailed vehicle models and PTV Vissim for realistic traffic provide surprisingly detailed insights.
-
Aired Scenarios
The development of autonomous vehicles leads to immense test and validation efforts. To handle complexity and costs, SERES has opted for a testing system from dSPACE that can be used early and flexibly in the development process – with real sensors in the loop.
-
Real Virtuality
How do you test vehicles on tracks that no test driver has ever driven before? The ZF technology group uses a virtual process based on map data and vehicle measurements to test vehicle functions during development. The resulting virtual world is realistically simulated using the ASM tool suite.
-
Eyes on the Road
Powerful tool chain for validating driver assistance systems
Well-coordinated tools for simulation, testing and visualization are indispensable in validating modern driver assistance systems. Developers need a quick, easy way to model the properties of the vehicle under test, as well as road networks, traffic and electronic control units (ECUs), and to visualize driving maneuvers realistically. Together, the Automotive Simulation Models (ASMs), ModelDesk and MotionDesk from dSPACE form a perfectly coordinated tool chain.
-
Virtual Winter Tests
No modern vehicle ever reaches the market without first undergoing exhaustive tests. And test vehicles alone are no longer enough to test the complex electronic control units. This job is performed by simulation models, which shift ECU development into the virtual reality of a virtual vehicle. Dr. Hagen Haupt, head of dSPACE's Modeling Group, explains how the dSPACE simulation models are meeting this challenge.
-
Efficient Vehicle Dynamics Development via Simulation-Based Prognosis Tools
This paper presents a method for designing and tuning suspensions purposefully and quickly with the help of vehicle dynamics simulation. The method is based on the Automotive Simulation Models (ASMs) from dSPACE, which have been extended for this use case. The ASMs support design engineers through all phases, from creating a virtual prototype up to close-to-production fine tuning during the test phase. This paper describes the necessary properties of the vehicle dynamics model that go beyond the functional scope of common handling models. At Daimler AG, the ASMs accompany the development during test drives, both for the pure vehicle dynamics design of the vehicle and for coupling the vehicle dynamics control systems to hardware-in-the-loop (HIL) systems.
- Open MATLAB®/Simulink® model
- HIL simulation with dSPACE Simulator
- Offline simulation with dSPACE VEOS and MATLAB/Simulink
- Turn-key solutions and worldwide support

Application areas: combustion engines, vehicle dynamics, electric components, advanced driver assistance systems
Real-time-capable simulation models and graphical user interface ModelDesk

The tool is suitable to be used in safety-related development projects according to ISO 26262:2018 for any automotive safety integrity level (ASIL).




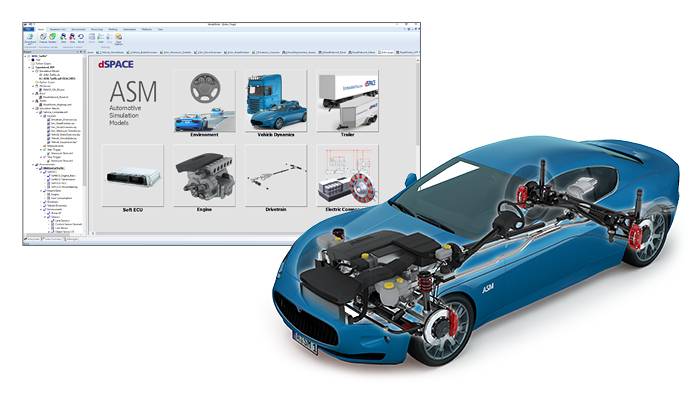
ASM: Simulation Tool Suite
The ASMs are a tool suite which consists of simulation models for automotive applications that can be combined as needed. The models support a wide spectrum of simulations, starting with individual components like combustion engines or electric motors, to vehicle dynamics systems, up to complex virtual traffic scenarios. The models can be handled easily and intuitively with ModelDesk, the graphical user interface.
Simulation Areas
- Combustion engines (gasoline, diesel)
- Vehicle dynamics (passenger car, truck, trailer)
- Electric components (motors, batteries, loads)
- Vehicle environment (road traffic, objects, traffic signs)
Benefits of ASM
The implementation of each model is open and traceable right down to the Simulink basic block level, so it is easy to supplement or replace components with customer-specific models. This means that the properties of each model can be optimally adapted to individual projects. The standardized interfaces of the ASMs make it easy to extend models and even create entire virtual vehicles. Road networks and traffic maneuvers can be easily and intuitively created using graphical parameterization tools with preview and clear visualization.
| Main Features |
Description |
Key Benefits |
|---|---|---|
| Open Simulink models | All model blocks are visible | Application-specific models can easily be added or used to replace model components |
| Online simulation | Real-time simulation on real-time hardware, e.g., DS1006 | Hardware-in-the-loop simulations with production-level ECUs |
| Offline simulation | Simulations as early as the controller algorithm design phase | Controller validation in early development stages |
| Online tunable parameters | Direct parameter access during real-time simulations | Online parameter optimizations and behavior studies |
| ASMSignalBus | Simulation signals are part of a structured Simulink signal bus | Standardized and fast access to model variables |
| Model interoperability | ASM models are easy to combine to create a virtual vehicle | An entire virtual vehicle can be simulated |
Combustion engines
The ASM engine models are ideal for developing and testing engine and exhaust gas aftertreatment ECUs. They simulate a combustion engine, including all the necessary components, as a controlled system for the ECUs. There are models for diesel and gasoline engines with different injection systems and exhaust gas aftertreatment systems. The real-time simulations can be performed with mean-value models or with physical models.
Vehicle Dynamics
The ASM Vehicle Dynamics Model is an excellent basis for developing and testing vehicle dynamics ECUs, such as ESP, steering and active damping ECUs. They are ideal for vehicle dynamics investigations in early development phases. Models for passenger vehicles, trucks and trailers are available. A user interface lets users configure the vehicles and define maneuvers and roads graphically.
Electrical Components
Vehicle electrical systems, electric drives and inverters, as well as starter batteries and high-voltage batteries, are all virtualized precisely by the simulation model for electric components. The model supports tasks such as developing and testing hybrid ECUs, battery management systems and indicator light controls. Users can parameterize the modeled components graphically to fit the real controlled system exactly.
Driver Assistance Systems
A comprehensive traffic model with road users and environmental objects is available for developing and testing driver assistance systems. The various sensor models in the simulated test vehicle detect the other road users and also the static and dynamic objects in the virtual environment. The traffic scenarios and the environment are easily defined graphically.
Model Design Philosophy
To offer the best possible support for customer-specific requirements, dSPACE has chosen an open model concept. You can view the models right down to the level of standard Simulink blocks. The dSPACE Automotive Simulation Models therefore provide enormous flexibility for projects that require dedicated simulation models. The open model approach allows perfect adaptation to individual projects and requirements. This is done by modifying models or by replacing and adding modeled components.
Virtual Vehicle
dSPACE Automotive Simulation Models are a collection of well-coordinated models that you can easily combine to build anything from extended models to a whole virtual vehicle. In addition to gasoline and diesel engines, there are models for vehicle dynamics and brake hydraulics, electric systems, and traffic. Combined models work together in one simulation.
Offline and Online Simulation
The tool suite ASM can be used in combination with real controllers in a hardware-in-the-loop environment (HIL or online mode), or for model-in-the-loop simulations (PC or offline mode). The same model configurations and parameters can be used seamlessly throughout all the steps from function development to ECU testing.
ASM supports real-time code generation via The MathWork’s Real-Time Workshop® and dSPACE’s RTI for online simulation on a dSPACE real-time system.
-
- View online
- Download
- First Steps with ASM These tutorial videos show you how to get started with ASM.
- ISO 26262 - Be on the Safe Side with Certified Simulation Tools Watch this video series to see how certified dSPACE simulation tools help you create a safe and reproducible simulated environment.
Drive innovation forward. Always on the pulse of technology development.
Subscribe to our expert knowledge. Learn from our successful project examples. Keep up to date on simulation and validation. Subscribe to/manage dSPACE direct and aerospace & defense now.