ASM is a modular and complete tool suite for numerous applications from powertrains to complete vehicles, from stationary to off-road, from rail to aerospace.
Real-time or faster
Designed for HIL, MIL, SIL and for the cloud.
Open
Open Simulink® models for easy understanding and customization.
Ready-to-use
Ready-to-use demos including parameterization, instrumentation and validation.
Certified
TÜV-certified for ISO 26262 to enable you to run a SOTIF-compliant validation process.
ASM is our flexible and highly customizable solution that offers turn-key as well as modular options tailored to your specific use cases.
What is ASM?
ASM (Automotive Simulation Model) is a tool suite consisting of simulation models that are used for developing and testing as well as verification and validation of control units (ECUs). The models support closed-loop testing of a wide range of control algorithms and provide the corresponding dynamic controller input and output from powertrain applications such as combustion engine, battery management, electric motors to vehicle stability and ADAS/AD. Due to the modular and scalable design, the models can be combined as required.
ASM is used in many industries:
- Automotive
- Agriculture
- Off-highway
- Defense
- Rail Industry
- Aerospace
- Automated mobile robots (AMRs)
What our customers say over the last 20 years
The ASM simulation tool suite plays a key role in validating functions for automated driving at Stellantis.

The ASM tool suite supports virtual test drives in complex traffic environments with a high degree of realism so that sensor data can be generated for the validation of our ADAS/AD control units.

In my opinion, dSPACE provides some of the best HIL hardware and software in the market. Overall, I'm very happy with the HIL system and how it has helped us improve our software testing capabilities.

We rely on the powerful dSPACE tool chain to validate the AI-based control unit of our autonomous technology platform as early as possible and in combination with the sensors and actuators.

dSPACE has provided our development department with a comprehensive solution for vehicle-in-the-loop (VIL) testing, which is successfully used for dynamic, scenario-based testing of automated real vehicles.

The seamless integration of the realistic simulation environment with the ECU of the real vehicle enables fast validation of the algorithms and iteration of the software, which significantly reduces the development time.










Powertrain
| ASM Fuel Cell | ASM Electric Components | |
|
ASM Fuel Cell allows you to simulate the air and water supply, the tank and the cooling system as well as the electrochemical reactions in the fuel cell stack and makes it possible to set up a realistic test environment for the ECU under test.
|
ASM Electric Components can be used for a wide range of applications in the field of electrical systems, from electric drives and inverters for closed-loop control to complete automotive electric systems including a battery, starter, and alternator. |
|
| ASM Battery | ASM Engine | |
|
A key component associated with electric drives is a powerful battery model that can be used in direct combination with a battery management system (BMS) ECU. Our models provide accurate simulations to perform component tests or analyze the performance of a battery system in any type of application. |
The ASM engine models are ideally suited for the development and testing of engine and exhaust aftertreatment control units. They simulate all relevant torque, pressure, temperature curves, fuel injection and all necessary components such as turbochargers and exhaust aftertreatment systems in various levels of detail. |
|
| ASM Drivetrain Basic | ||
|
ASM Drivetrain Basic provide a set of components to transfer the torque from the energy source to the road for all types of vehicle drives.
|
||
Vehicle
ASM Vehicle Dynamics
The ASM Vehicle Dynamics Models are designed as multi-body system of a passenger car and diverse truck and trailer combinations. Therefore it is an excellent basis for developing and testing ECUs that require lateral and longitudinal dynamics of the vehicle, such as ESP, steering and active damping ECUs. It contains steering, braking, suspension, tire and other modules relevant for this controller type. A tool suite provides you user-friendly editors to configure the vehicles and define maneuvers and roads.
Traffic
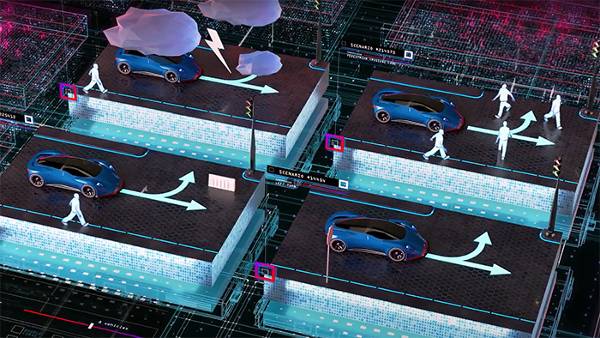
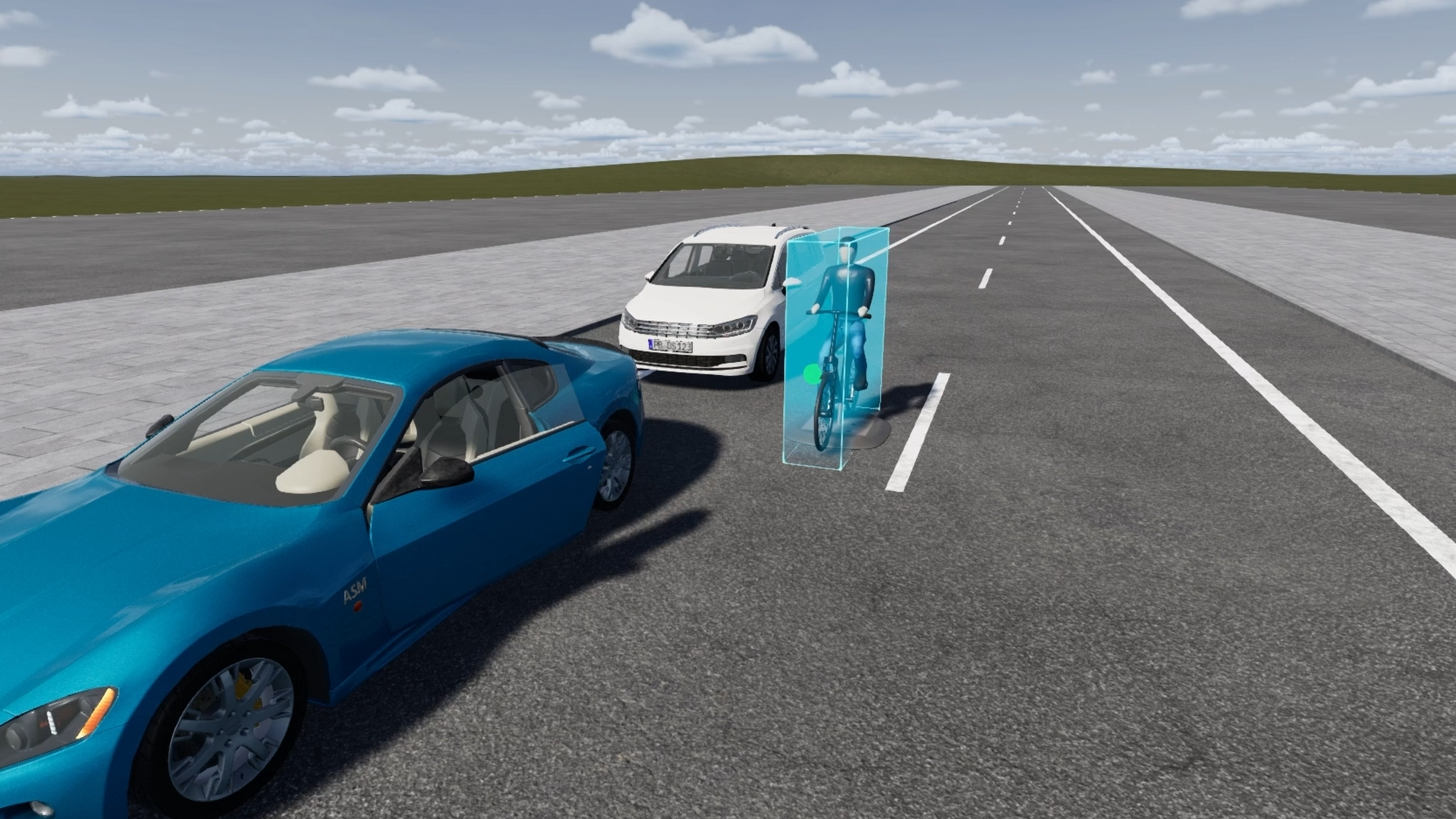
ASM Traffic
ASM Traffic models simulate road users such as vehicles or pedestrians in complex environments on highways, in rural and urban areas and provide various sensor signals at object list level that are required for a driving function. ASM Traffic therefore provides the basis for the virtual validation and verification of advanced driver assistance systems and autonomous vehicles (ADAS/AD).
Customized
Engineering Services
Our goal is to support our customers in all modeling issues related to the development of control systems in the automotive and other industries. ASM's open, modular and well-documented structure is designed for easy customization. Our Engineering Services can support you in this.
Required Products

Optional Products








The development of ASM - Interview Dr. Herbert Schütte and Michael Peperhowe
Dr. Herbert Schütte, who initiated the ASM development and has been driving its further development for a long time, and Michael Peperhowe, who is now taking over the further development of ASM as Director Simulation Models & Scenarios are talking about the development of dSPACE Automotive Simulation Models.

Automotive Simulation Models 2026-A
With Release 2026-A, new ASM products for native OpenX support and motorbike simulation expand the portfolio.
In addition, ASM Traffic has been enhanced with new features for testing driver monitoring systems (DMS). Its OSI Interface now also supports the OSI subtype information for lanes.
Support for ASM Users
Links to detailed technical information and customer service. Access may require registration.